Electric Drives for Deck Mooring Equipment
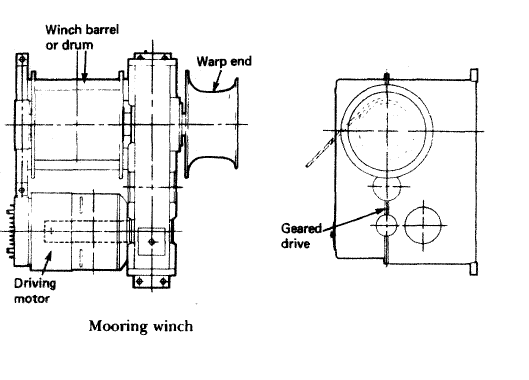
Winches with various arrangements of barrels are the usual mooring
equipment used on board ships. A mooring winch is shown in Figure below
where the various parts can be identified. The winch barrel or drum is
used for hauling in or letting out the wires or ropes which will fasten the
ship to the shore. The warp end is used when moving the ship using
ropes or wires fastened to bollards ashore and wrapped around the warp
end of the winch.